高精度 FPC 柔性装配数据集
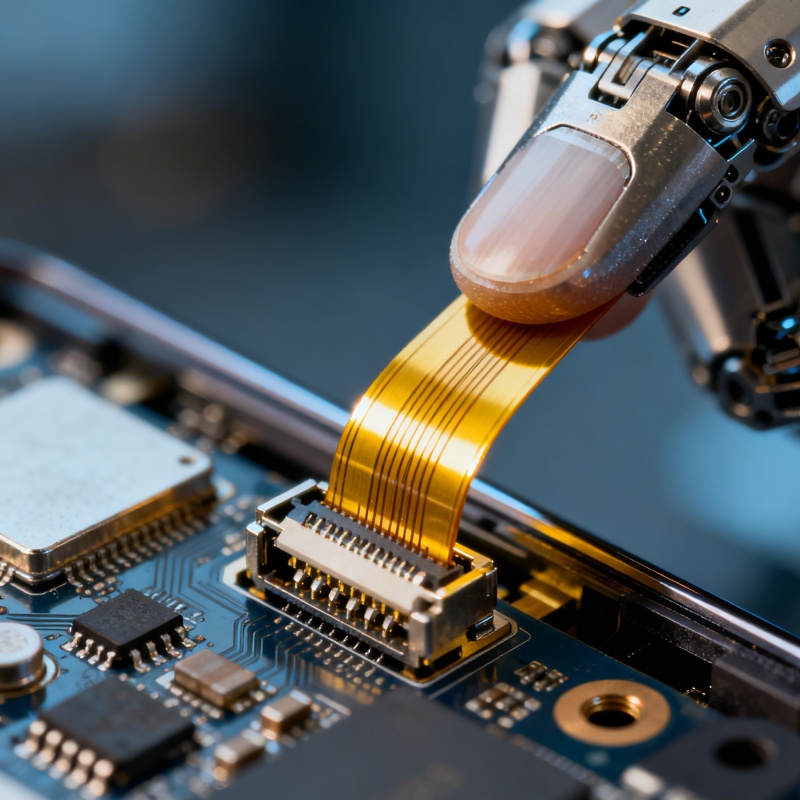
包含 FPC 插拔过程中捕捉微滑移与剪切力矢量的高频触觉事件流数据。提供同步的 RGB-D 视觉与力/力矩真值,专为解决 3C 制造中的非刚性对齐难题而设计。

我们在不打扰工人操作的前提下,持续采集视觉、触觉和手部运动数据,形成可直接用于灵巧手控制与模型训练的高保真数据资产。
包含 FPC 插拔过程中捕捉微滑移与剪切力矢量的高频触觉事件流数据。提供同步的 RGB-D 视觉与力/力矩真值,专为解决 3C 制造中的非刚性对齐难题而设计。
包含实验室玻璃器皿、透明塑料及抛光金属球的抓取交互数据。专为深度相机失效的“视觉拒止”场景设计,提供纯触觉的曲率重建与接触映射数据。
涵盖不同刚度与直径的线缆动态操作数据。记录了在汽车线束组装场景下,复杂理线、捋直及穿孔任务中的实时张力反馈与动态摩擦系数。
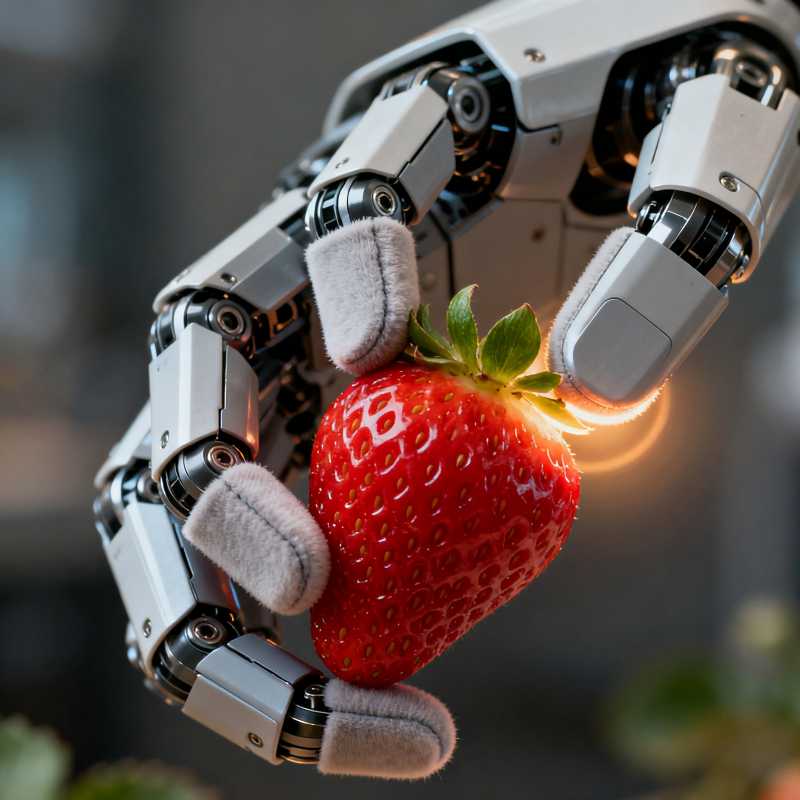
涉及软体生物样本(如浆果、豆腐)及精密易碎工业件的超低力交互数据(力分辨率 <0.01N)。专注于基于自适应刚度控制与均匀压力分布模型的无损抓取研究。
记录了手内物体重定向的复杂灵巧操作序列。包含高速事件流数据,用于在无外部相机或存在遮挡情况下的实时手内位姿估计。
在零光照环境下采集的微米级表面拓扑扫描与摩擦特征数据。涵盖多种工业材料(拉丝金属、碳纤维)的微小缺陷检测、材质分类与表面质量控制数据。